Polscy inżynierowie stworzyli mechanizm nogi skoczka księżycowego. Robot, powstający na zlecenie Europejskiej Agencji Kosmicznej (ESA), ma stanowić alternatywę dla łazików, które nie zawsze radzą sobie w trudnym terenie Księżyca.
Polska firma Astronika przedstawiła w środę w Centrum Badań i Technologii Kosmicznych Europejskiej Agencji Kosmicznej (ESA-ESTEC) w Noordwijk (Holandia) ukończony mechanizm nogi skoczka księżycowego - podano w czwartek w komunikacie prasowym.
Polacy na zlecenie ESA pracują nad zrobotyzowanym pojazdem, który mógłby wyręczać łaziki. Te tradycyjnie wykorzystywane na Księżycu maszyny nie zawsze radzą sobie w tamtejszym nierównym terenie, pokrytym regolitem (luźną warstwą skał i pyłu). W księżycowych górach, które często stanowią dla łazików barierę nie do pokonania, skoczek będzie mógł swobodnie się poruszać. A właśnie regiony górzyste naszego satelity najbardziej interesują teraz naukowców badających m.in. przeszłość Układu Słonecznego i zasoby złóż naturalnych.
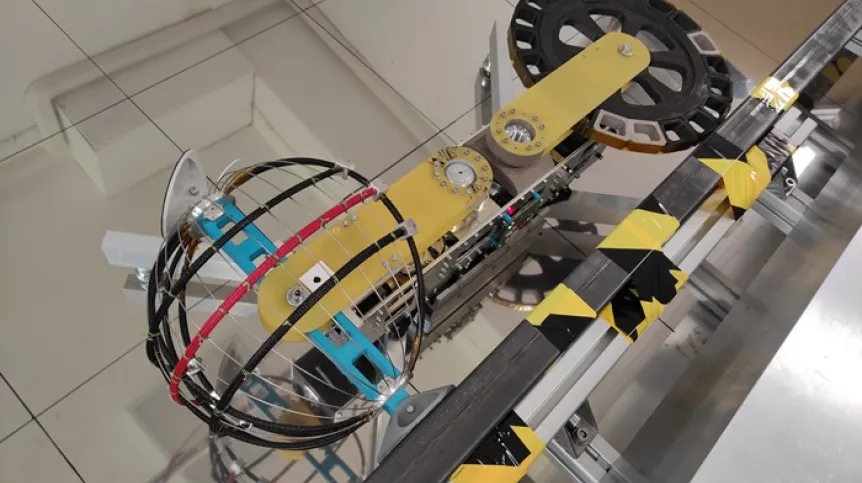
W pierwszej fazie projektu polscy inżynierowie zaprojektowali, wykonali i przetestowali nogi skoczka. To kluczowy element dla działania całego robota. Po udanej prezentacji w Centrum Badań i Technologii Kosmicznych firma Astronika liczy, że projekt będzie kontynuowany, a ESA zleci jej wykonanie pełnego modelu maszyny, która miałaby być wykorzystywana podczas misji księżycowych.
Zapotrzebowanie na podobne roboty będzie z pewnością wzrastać – już wiadomo, że w najbliższej dekadzie na Księżyc, Marsa i asteroidy tylko NASA, ESA i Chińska Narodowa Agencja Kosmiczna chcą wysłać przynajmniej kilkanaście lądowników. Podobne plany mają też inne kraje i prywatne firmy.
Opracowana przez Polaków technologia to rozwiązanie wielu problemów, z jakimi spotykały się dotychczasowe misje kosmiczne podczas lądowań na ciałach niebieskich. Lądowniki przewracały się albo grzęzły w trudnym terenie.
Testowane wcześniej roboty skaczące innych producentów sprawdzały się jedynie w warunkach mikrograwitacji (mały niską energię skoku), nie mogłyby więc skutecznie przemieszczać się na Księżycu albo Marsie. Inne maszyny były budowane jako wieloczłonowe konstrukcje kroczące, zużywające dużo energii w krótkim czasie – a to skraca czas operacyjny i ogranicza eksplorację większego terenu.
Polski skoczek waży mniej niż 10 kg i jest efektywny energetycznie. Jego twórcy zapewniają, że na Księżycu może skakać na wysokość nawet powyżej 3 m.
„Nasze rozwiązanie wykorzystuje koncepcję odpychania się od powierzchni za pomocą lekkich nóg – tak jak robi to konik polny. Skoczek zaprojektowany do grawitacji księżycowej jest łatwo skalowalny także do mniejszych grawitacji. Nasza konstrukcja bazuje na prostocie i wytrzymałości przy bardzo małym poborze mocy – mówi cytowany w komunikacie inżynier mechanik Łukasz Wiśniewski, kierownik projektu.
Podczas misji księżycowej zadaniem skoczka mogą być m.in.: określanie składu pyłu księżycowego, prowadzenie pomiarów spektrometrycznych, fotografowanie lądownika-matki z różnych perspektyw oraz analizowanie nośności powierzchni. Wyposażony w kamery skaczący robot może również badać właściwości mechaniczne regolitu. Wiedza na temat księżycowej gleby ma kluczowe znaczenie m.in. dla prac nad przemieszczaniem się pojazdów i ludzi po powierzchni naszego satelity i budowaniem tam ewentualnych baz. Zdobywanie takich informacji dzięki stosunkowo niedrogiemu narzędziu, jakim będzie skoczek, może wpłynąć na zmniejszenie kosztów przyszłych misji kosmicznych.
To, jak księżycowy robot będzie ostatecznie wyglądał, okaże się w kolejnych fazach projektu. Twórcy skoczka zakładają połączenie w maszynie kół i skaczących nóg: koło będzie umieszczone na nodze, a ta umożliwi robotowi wybicie się ponad powierzchnię gruntu za pomocą urządzenia, które zostało właśnie zaprezentowane w Centrum Badań i Technologii Kosmicznych ESA.

„Dotychczas większość misji eksploracyjnych planowanych było bardzo zachowawczo. Łaziki i lądowniki wysyłano tylko na stosunkowo płaski, bezpieczny teren, który niestety daje informację naukową tylko na temat najświeższej historii ciała niebieskiego. A i tak często maszyny te lądowały w nieprzewidzianie trudnych warunkach albo przewracały się i stawały się powoli bezużyteczne” – mówi Łukasz Wiśniewski.
Dodaje, że dużo ciekawsze jest kierowanie instrumentów naukowych w tereny trudno dostępne, np. na klify i skały albo w kaniony. W takich formacjach widać bowiem przekroje skał tworzących ciało niebieskie.
„Nikt jednak nie odważy się wysłać łazika wartego kilkaset milionów euro w potencjalnie samobójczą misję. Mały robot skaczący jest stosunkowo niedrogi i łatwo go zabrać na pokład. Jest niczym sprytny i pomocny skaut, który może wykonać zwiad w ryzykownym terenie, zanim wjedzie tam łazik” – tłumaczy szef projektu.
Jego zdaniem wykorzystanie skoczka zwiększa bezpieczeństwo i naukową wartość misji – choćby dzięki zdobywaniu informacji o właściwościach mechanicznych powierzchni Księżyca.
„Jeżeli skoczek gdzieś ugrzęźnie, to nie szkodzi. Takie właśnie jest jego zadanie, aby dotrzeć tam, gdzie jeszcze nikt nie próbował i wykonać pionierskie pomiary. Jednocześnie misja nie utraci zdolności wykonania swoich głównych celów za pomocą lądownika matki albo łazika – uważa Wiśniewski.
Polacy należą do pionierów w rozwoju tej technologii, która może okazać się przełomowa w sposobie eksploracji ciał niebieskich.
Prace nad stworzeniem skoczka zostały sfinansowane przez Europejską Agencję Kosmiczną w ramach programu PLIIS (Polish Industry Incentive Scheme) we współpracy z Centrum Badań Kosmicznych PAN. Projekt był możliwy dzięki współdziałaniu polskiego sektora kosmicznego, Ministerstwa Rozwoju i Technologii oraz Polskiej Agencji Kosmicznej.(PAP)
abu/ bar/
Fundacja PAP zezwala na bezpłatny przedruk artykułów z Serwisu Nauka w Polsce pod warunkiem mailowego poinformowania nas raz w miesiącu o fakcie korzystania z serwisu oraz podania źródła artykułu. W portalach i serwisach internetowych prosimy o zamieszczenie podlinkowanego adresu: Źródło: naukawpolsce.pl, a w czasopismach adnotacji: Źródło: Serwis Nauka w Polsce - naukawpolsce.pl. Powyższe zezwolenie nie dotyczy: informacji z kategorii "Świat" oraz wszelkich fotografii i materiałów wideo.